

















 14 / 103
14 / 103

Page 46
conferenceseries
.com
Volume 10, Issue 8 (Suppl)
J Proteomics Bioinform, an open access journal
ISSN: 0974-276X
Structural Biology 2017
September 18-20, 2017
9
th
International Conference on
Structural Biology
September 18-20, 2017 Zurich, Switzerland
Micro robotics enables non-contact, fully automated protein crystal harvesting
David F Sargent
ETH Zurich, Switzerland
Statement of the Problem:
Most aspects of macromolecular structure determination, from synthesis and purification of
materials, through crystallization, data collection and model building, are highly automated. But the recognition, harvesting
and cryocooling of crystals reminds of a predominantly manual task. Several concepts, including
in situ
crystallography, are
being developed to overcome these difficulties, but frequently impose other restrictions such as data collection strategies. We
are developing hardware and software to support crystal harvesting using standard crystallization procedures, thus avoiding
such limitations.
Methodology & Theoretical Orientation:
We use a magnetically driven mobile, rolling micro robot, the RodBot, to locally
move the liquid surrounding crystal. The crystal then passively follows the flow. Crystal position is monitored using low level
UV-light. Transport is controlled using flexible algorithms that allow for error-recovery, following stochastic disturbances.
Findings:
We demonstrated the effectiveness of the technique using crystals of different geometries and densities in a variety
of buffers and cryoprotectants. Even at this developmental stage average harvesting time is reduced compared to manual
operations.
Conclusion & Significance:
This non-destructive, non-contact method allows crystals to be extracted reliably from the growth
droplet in a completely automated process. Harvesting can take place remotely in climate-controlled chambers, ensuring
optimal conditions throughout the process with respect to temperature, humidity and composition of the environment.
Damage to valuable crystals due to operator jitter or fatigue is eliminated. Incorporation into existing robotics setup for sample
handling will also allow increased reproducibility of flash-cooling. Fully automated structure determination pipelines using
well-established techniques are now possible and can yield improved data quality at reduced cost.
Biography
David F Sargent has obtained his PhD in Biophysics from the University of Western Ontario, Canada, followed by Postdoctoral studies at the ETH Zurich and the
University of Sydney (Australia). He has extensive experience in macromolecular crystallography at the ETH Zurich, and recently has also been associated with the
Multiscale Robotics Laboratory (ETH Zurich) of Bradley J Nelson. He is one of the founders of MagnebotiX, a spinoff of the ETH, which provides tools for magnetic
propulsion and guidance at the microscopic scale. The work reported above uses this technology to streamline and accelerate the process of macromolecular
crystal structure determination.
david.sargent@magnebotix.comDavid F Sargent, J Proteomics Bioinform 2017, 10:8(Suppl)
DOI: 10.4172/0974-276X-C1-0100
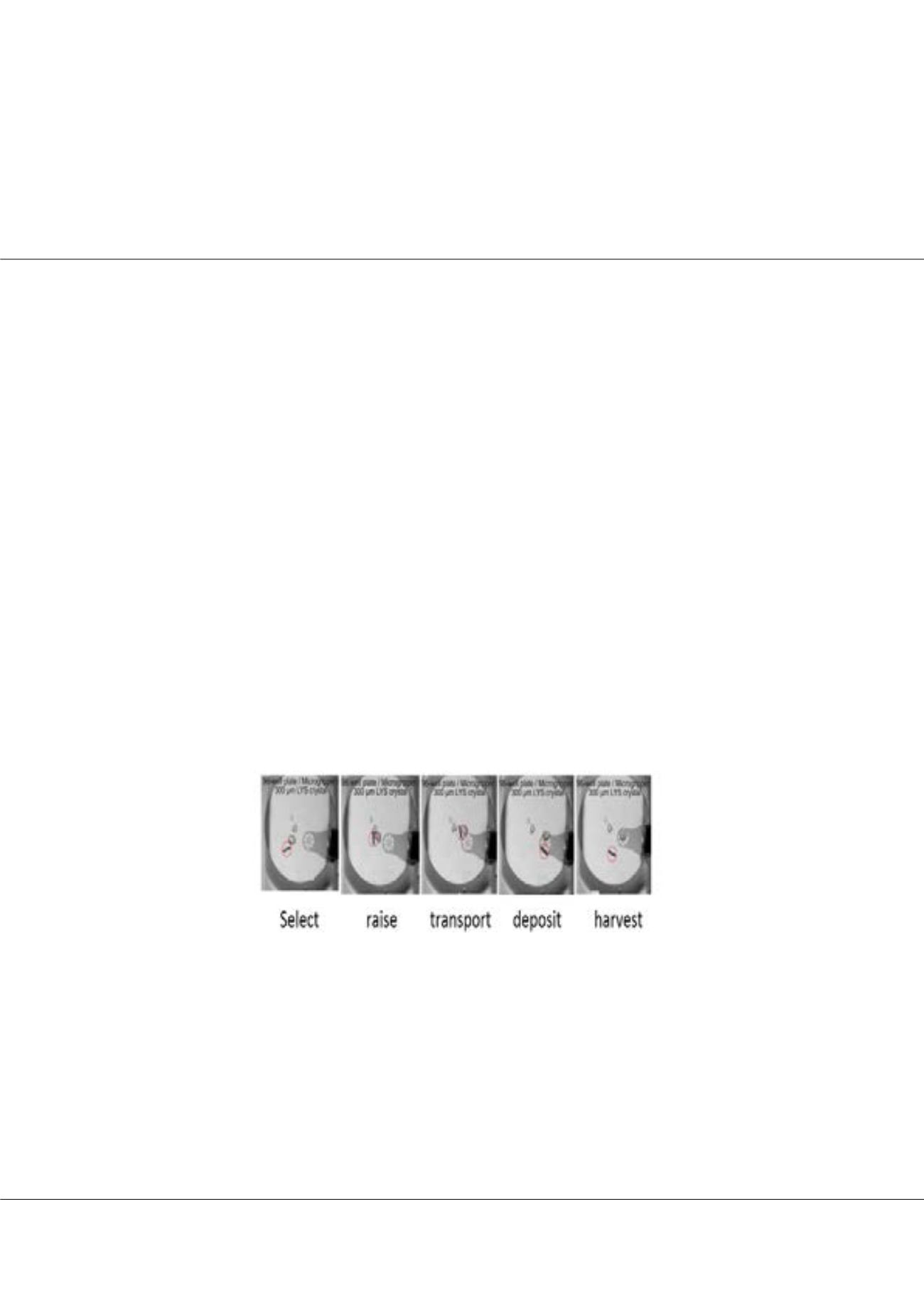
Figure1:
Crystal harvesting using the RodBot micro robot (in red circle). From left: Selecting one of several crystals in a droplet of a 96-well
plate; fluid flow from the approaching RodBot raises the crystal off the bottom of the droplet and transports the crystal towards the micro-
mount; the crystal is deposited on the micromount, where upon the crystal can be harvested, flash-cooled and stored using a robotic arm.