















 8 / 19
8 / 19

Page 86
conferenceseries
.com
Volume 7, Issue 6 (Suppl)
J Nov Physiother
ISSN: 2165-7025 JNP, an open access journal
Physiotherapy 2017
November 27-29, 2017
November 27-29, 2017 Dubai, UAE
5
th
International Conference on
Physiotherapy
Reducing assistance force during robotic-assisted gait training improves motor function:Arandomized
controlled trial in patients with subacute stroke
Jiho Park
1
, In Jae Park
2
, Hyunyong Seong
2
, Yong Il Shin
2
and Joshua H You
1
1
Yonsei University, South Korea
2
Pusan National University-Yangsan Hospital, South Korea
Background:
In order to determine optimal control strategies for
robotic-assisted gait training (RAGT), it is essential to take into
account, the level of assistance force of the robot system affect
locomotor control. However, none of the studies investigated the
effects of different level of assistance force control during RAGT on
motor function in patients with subacute stroke.
Objectives:
To compare the effects of full assistance force (Full-AF) versus 60% assistance force (60%-AF) RAGT on motor
function in patients with subacute stroke.
Methods:
23 patients (age >19 years; 4 weeks after the onset but 6 months) with subacute stroke at Functional Ambulation
Category (FAC) 0-3 were randomly assigned into two different RAGT groups. 11 were treated with Full-AF RAGT combined
with conventional physical therapy and 12 were treated with 60%-AF RAGT combined with conventional physical therapy. Two
groups performed 5 days a week for 4 weeks, with a total of 40 sessions. After 4-weeks of RAGT combined with conventional
physical therapy, all patients underwent only conventional physical therapy 5 days a week for 4 weeks, with a total of 20
sessions. Clinical outcomes included FAC, Berg Balance scale (BBS) and Korean version of the modified Barthel index (K-MBI)
measured at pre-RAGT, post-RAGT and 4-week follow-up.
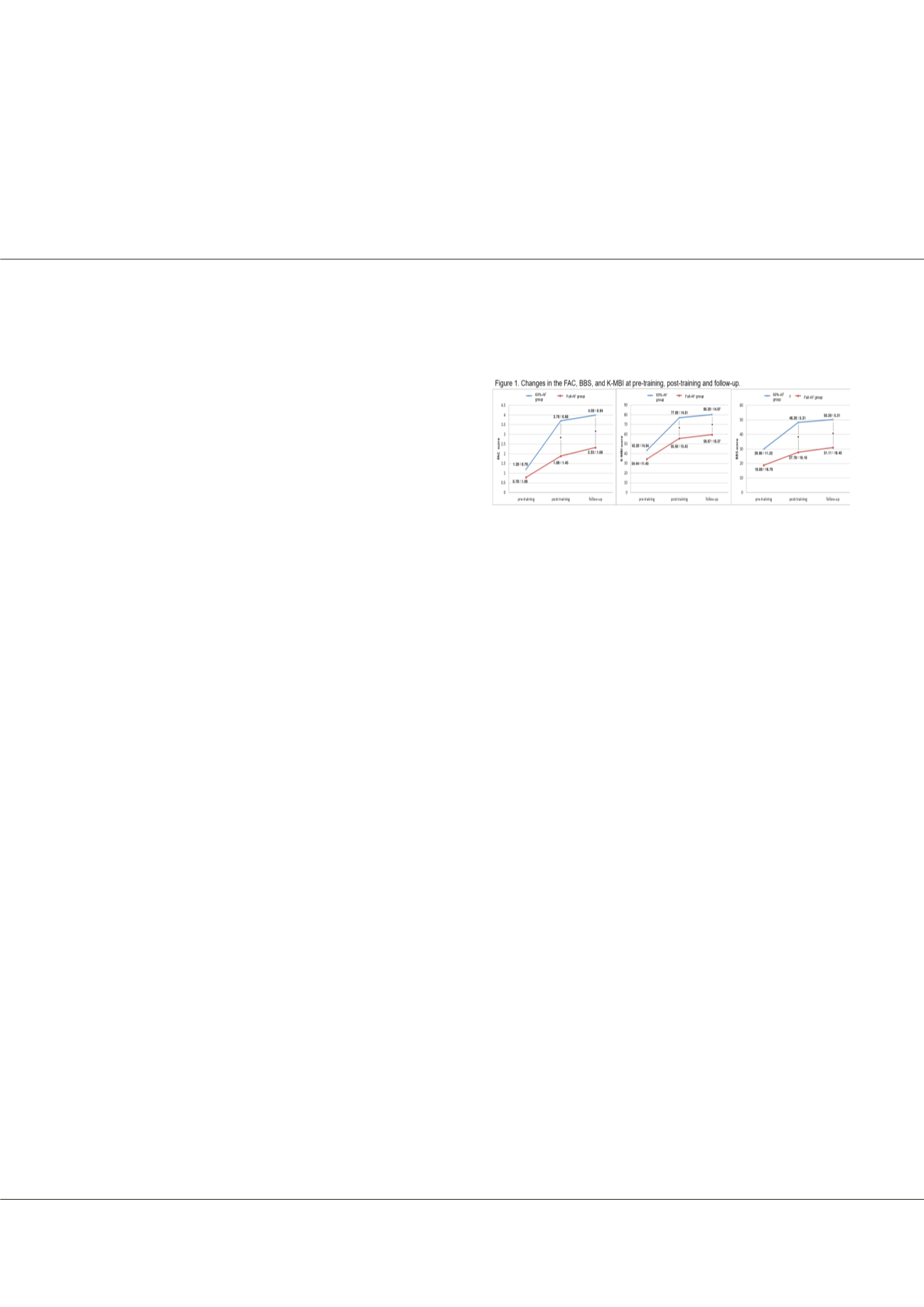
Results:
In the intention-to-treat analysis, there were between two groups effects for clinical motor functions (Figure-1). In
addition, both groups showed significantly improved at post-training (P=0.01) and follow-up (P=0.01) in the FAC; post-
training (P=0.01) and follow-up (P=0.006) in BBS and post-training (P=0.022) and follow-up (P=0.017) in K-MBI.
Conclusion:
Reducing robotic assistance force during RAGT may be more effective robotic control strategy than full robotic
assistance force RAGT in facilitating motor recovery and retention of trained locomotor functions in patients with subacute
stroke.
Biography
Jiho Park received her BSc degree in the department of Physical Therapy from Yonsei University, Wonju, South Korea. She is currently a PhD student at the Yonsei
University. Her research interests include robotic-assisted gait training, human-robot interaction, gait-related brain dynamics, control strategies, neuromuscular
control and motor learning in patients with neurological impairments.
References
1.Marchal-Crespo L, Reinkensmeyer DJ (2009). Review of control strategies for robotic movement training after neurologic injury. Journal of neuroengineering and
rehabilitation 6:20.
2.Morone G, Paolucci S, Cherubini A, De Angelis D, Venturiero V, Coiro P, Iosa M (2017). Robot-assisted gait training for stroke patients: current state of the art
and perspectives of robotics. Neuropsychiatric disease and treatment 13:1303.
theron084@naver.comJiho Park
et.al., J Nov Physiother 2017, 7:6(Suppl)
DOI: 10.4172/2165-7025-C1-021