














 37 / 38
37 / 38

conferenceseries
.com
Volume 6, Issue 4 (Suppl)
J Spine, an open access journal
ISSN: 2165-7939
Page 71
July 24-26, 2017 Rome, Italy
&
Spine and Spinal Disorders
2
nd
International Conference on
Neurology and Neuromuscular Diseases
6
th
International Conference on
CO-ORGANIZED EVENT
Upper limb assistive devices for muscular dystrophy patients: Proposed approaches
Marta Gandolla
1
, Andrea Costa
1
, Lorenzo Aquilante
1
, Emilia Biffi
2
, Grazia D’Angelo
2
, Margit Gfoehler
3
, Markus Puchinger
3
, Reuven Katz
4
, Francesco Braghin
1
and
Alessandra Pedrocchi
1
1
Politecnico di Milano, Italy
2
Istituto Scientifico Medea, Italy
3
TU Wien, Austria
4
Technion, Israel
Statement of the Problem:
People with neuromuscular diseases, such as muscular dystrophies experience a distributed and evolutive
weakness in the whole body. Much effort has been invested to fight this disease from its genetic origin. Recent technological
developments have improved the quality of life of many disabled people. In particular, upper limb assistance for muscular dystrophic
patients is nowadays not investigated. A two-folded approach has been adopted – investigated already existing commercial solutions
to be used by our target patients, and develop a dedicated device.
Methodology:
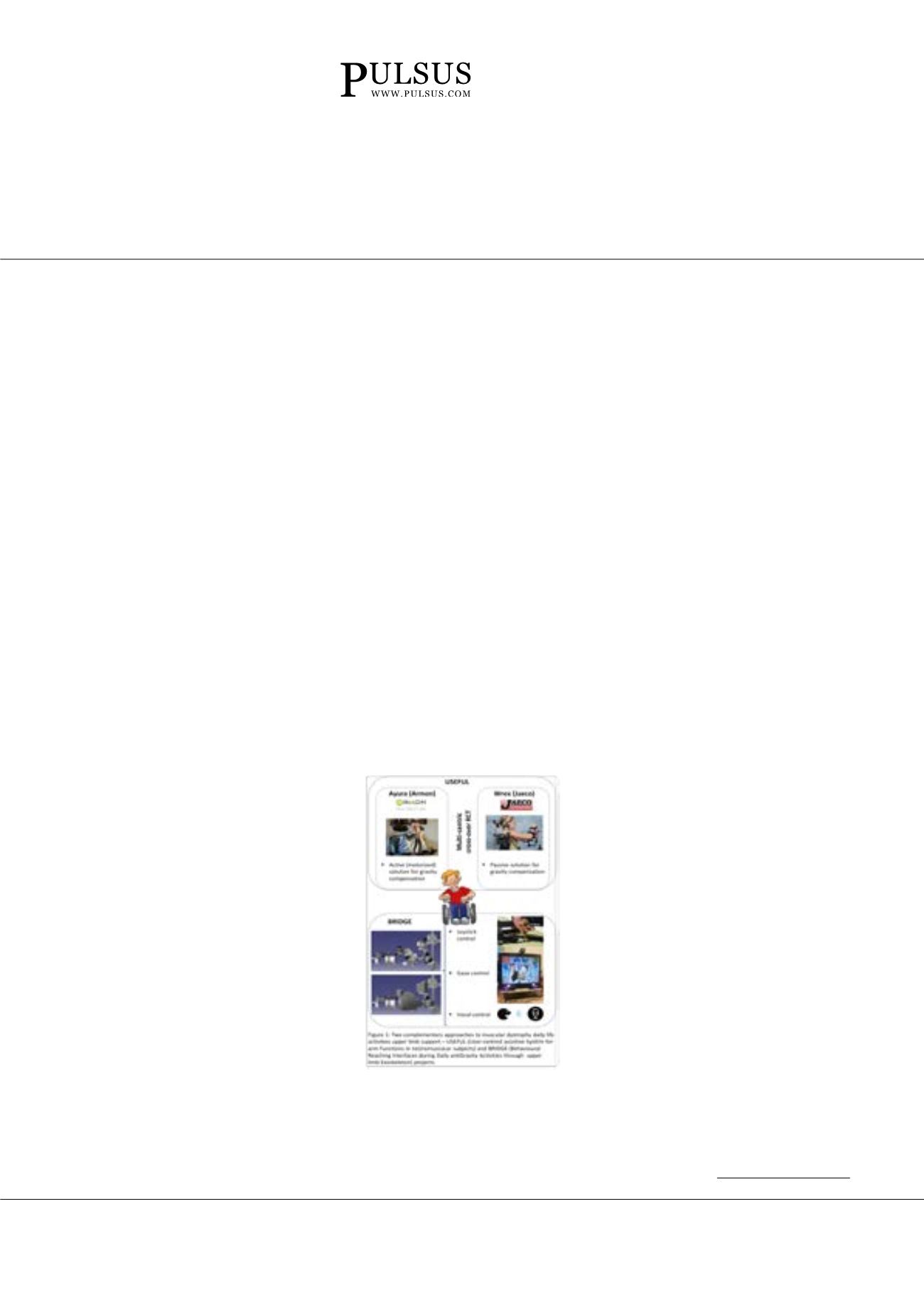
First approach: USEFUL (User-centred assistive SystEm for arm Functions in neUromuscuLar subjects) selected two
commercial solutions for upper limbs gravity compensation: ARMON AYURA (motorized) and JEACOWREX (passive) to be tested
at home in a crossover RCT study. PUL, TAM, SUS scales are used to assess whether the systems are usable, acceptable and efficient
for the target pathology. The clinical trial has been registered to the Italian Ministry of Health (013/16-CE), and on clinicaltrials.gov
(GUP15021). Preliminary tests demonstrated that both devices are only suited for patients in the early stage of the disease. Second
approach: BRIDGE (Behavioural Reaching Interfaces during Daily antiGravity Activities through upper limb Exoskeleton) is a light,
wearable and powered five degrees of freedom exoskeleton (i.e., shoulder flexion/extension, abduction/adduction, internal/external
rotation; elbow flexion/extension; wrist pronation/supination) under the direct control of the user through joystick, gaze or vocal
control. An inverse kinematic model allows to track patient desired hand position. BRIDGE prototype has been developed, and
successfully tested in simulation environment, and by a group of healthy volunteers with good tracking performance.
Conclusion & Significance:
For both proposed complementary approaches preliminary results are encouraging towards keeping
muscular dystrophy patients upper limbs as functional and autonomous as possible.
Biography
Marta Gandolla (MSc in Biomedical Engineering in 2009 and European PhD
cum laude
in Bioengineering in 2013 from Politecnico di Milano) is a Post-Doc
Research Fellow at the Neuroengineering and Medical Robotics Laboratory since 2013. In 2011 she was a visiting PhD student at the Sobell Department of Motor
Neuroscience of the UCL Institute of Neurology (London, UK), under the supervision of Dr. N Ward, co-supervisor of her PhD thesis. Her research interest is about
the design, and on-field evaluation of innovative methods based on electrical stimulation and/or robotic systems for the rehabilitation and assistance of neurological
patients. Moreover, she is interested in central mechanisms of neurological rehabilitation and re-learning investigated through fMRI images. She is currently
Lecturer Assistant for Biomedical Signal Processing and Biomedical Images, and Bioelectromagnetism and Biomedical Instrumentation at Politecnico di Milano.
u3002479@connect.hku.hkMarta Gandolla et al., J Spine 2017, 6:4(Suppl)
DOI: 10.4172/2165-7939-C1-005